Link do vídeo que apresenta a nossa Intervenção em Catas Altas:
https://www.youtube.com/watch?v=eIDcqmpHuCQ&feature=em-upload_owner
domingo, 30 de junho de 2013
terça-feira, 18 de junho de 2013
Intervenção - Catas Altas
Escolhemos a Praça Adelaide Alves, por termos visto grande potencial escondido atrás de tanto descuido e da falta de pessoas utilizando o local. Percebemos que a praça se encontrava constantemente vazia, estava mal cuidada, com a grama muito alta, má iluminação durante a noite além de estar danificada em vários locais. Percebemos com isso que a população parou de frequentar o local e com o tempo, este adquiriu um caráter irrelevante na cidade.
A praça possui grandes dimensões, o que se tornou um desafio a ser superado ao longo do trabalho. Ela possui três divisões espaciais claras: a área da praça, a região do parquinho e a quadra poliesportiva; sendo a quadra, a mais utilizada de todas. A nossa intervenção foi constituída pela distribuição de diferentes cubos luminosos ao longo praça, com que as pessoas puderam interagir, vendo o que cada um fazia, levando-os para outros lugares da praça ou jogando-os uns aos outros. Junto a isso, elaboramos duas luzes no fundo do parquinho que apenas se acendiam se alguém passasse do outro lado da praça, nosso objetivo com isso foi integrar todos os extremos da praça e dar a sensação de movimento, apenas quando as pessoas estão e passeiam na praça.













.JPG)
Desse trabalho, conseguimos absorver não apenas experiência em nossa área, mas também nos torar mais humanos. A demonstração de carinho, atenção e preocupação da população de Catas Altas foi inexplicável. É uma verdadeira satisfação ter conseguido entregar algo positivo a essas pessoas e tê-las visto se divertir com nossa instalação. Crianças, adultos e velhinhos, passeando na praça, brincando e rindo, girando, batendo e levando os cubos para lugares diferentes. Conseguimos mostrar que a praça sem a utilização das pessoas, é insignificante. Nosso trabalho não teria conseguido trazer vida ao local, sem a presença da vizinhança. Assim, agradecemos a ajuda os nossos professores e colegas que nos guiaram e ajudaram com os imprevistos e, principalmente, agradecemos à população de Catas Altas por sua hospitalidade e boa vontade.
sexta-feira, 3 de maio de 2013

terça-feira, 30 de abril de 2013
Objeto Interativo - Buchelino

O trabalho foi projetar e construir um objeto que envolvesse eletrônica e interação entre pessoas. Depois de ter varias ideias e de receber as criticas dos meus colegas e professores, cheguei a ideia final do Buchelino, objeto feito por varias buchas vegetais. Dentro das buchas foram colocados circuitos de LEDs e sensores de mercúrio (dentro de caixinhas para proteger-los), para que as luzes piscassem dependendo da posição em que fossem dobradas as buchas. Também foi colocado arame no interior desse material, para dar mobilidade e forma à figura. Coloquei em diferentes partes das buchas dispositivos de som que emitiam barulhos de animais, que retirei de ursinhos de pelúcia e brinquedos de 1,99 reais. Isso proporcionou varias possibilidades para que as pessoas pudessem interagir com o objeto e entre si, decidindo que forma lhe dar e descobrindo os diferentes barulhos.
O Buchelino parece ter vida própria no escuro. As pessoas reagem com risadas e com entusiasmo para continuar interagindo com o objeto. O estranhamento da textura, formas e barulhos, fazem com que as pessoas se divirtam.
 |
| Fotos do processo de montagem |
 |
| Fotos do Buchelino |
 |
| Fotos do Buchelino no escuro |
 |
| Buchelino na apresentação á turma e um dos croquis das ideias iniciais |
domingo, 21 de abril de 2013
ADA - Karina Smigla-Bobinski
Um globo preenchido com uma combinação de
hélio e ar, que flutua no interior de uma sala. É composto por uma membrana de
silicone transparente e 300 pinos de carvão espalhados por toda sua superfície,
que rabiscam as paredes, teto e piso, de modo autônomo, embora movida pelo
visitante.



.jpg)
A obra é chamada de ADA em homenagem a Ada
Lovelance, filha do poeta britânico Lord Byron, reconhecida no séc. XIX por ser
a primeira programadora da historia. Ela teve a intenção de inventar uma
maquina que seria capaz de criar obras de arte, por si só. Porém, o tal
computador criativo nunca foi construído.
ADA é uma escultura-artista que atua
criativamente, uma performance de uma maquina vital, uma obra de arte com alma.
O visitante tenta controlar ADA, porém o resultado sempre é imprevisível. Os padrões
de pontos e linhas, tão complexos, deixados pela interação entre a obra e os visitantes,
são indecifráveis e sua decodificação apenas é disponível na imaginação e nos
sonhos de cada um.



.jpg)
Strandbeest - Theo Jansen
Desde 1990,
Theo Jansen vem criando novas formas de vida. São animais feitos de tubos
amarelos de plástico (PVC), essa forma de esqueleto os faz capazes de andar com
o vento (energia eólica), sem ter que se alimentar. Com o tempo, estes
esqueletos têm se tornado cada vez melhores na sobrevivência às circunstancias
naturais, como tempestades e água. O artista deseja, em um futuro não tão distante,
colocar rebanhos desses animais nas praias, para assim eles conseguirem viver
suas próprias vidas. Estas esculturas dinâmicas têm, em parte, o objetivo de
quebrar as divisões entre a arte e a física e abrir a porta a novas formas
artificiais de vida.
A proporção
complexa dos tubos é calculada por meio de fórmulas matemáticas complexas que dão
a arte de Jansen suas qualidades cinéticas inspiradoras. Estas
esculturas estão equipadas com um contador de passos e um detector de água, o
seu contato com o mar ou qualquer outra água, por exemplo, leva a uma liberação
de ar e protege a criatura de se perder entre as ondas. Enquanto
as variações do vento ajudam ao esqueleto a se movimentar em diferentes
direções. Estas peças de arte dinâmica tem inspiração nas formas mais simples
encontradas na natureza, porém utiliza métodos e
conceitos complexos na sua elaboração.
Características interessantes:
-Ao sentir uma tempestade se aproximar, ele
se ancora na areia. Isto é possível, pois, existe um martelinho, no interior da
estrutura, que ao bater nela, parte das pernas é enterrada na areia.
- As pernas semelhantes às de insetos são
mais eficientes do que as rodas, pois eles não precisam tocar cada centímetro
de terra em seu caminho.
Mecanismos
de construção dos esqueletos:
http://www.youtube.com/watch?feature=player_embedded&v=-GgOn66knqA http://garethrees.org/2011/07/04/strandbeest/
Seus primeiros modelos só podiam andar a
favor do vento, impulsionados por velas rígidas. Os modelos posteriores tiveram
velas semelhantes a asas que forneciam propulsão independente da direção do vento. Os
últimos modelos ainda utilizavam as vela, mas agora para armazenar ar
comprimido que continua a impulsionar o mecanismo durante
pausas curtas do vento.
O
esqueleto, de tubos de plástico, está estruturado pelas ligação Jansen,
simples ligações mecânicas que utilizam onze hastes unidas, transformando o
movimento circular de uma manivela, em um movimento suave de um andar a pé. O
processo de criação desta estrutura foi algo complexo, ao ponto de Jansen ter
que desenvolver um programa de computador para realizar os cálculos.



.jpg)



.jpg)
domingo, 14 de abril de 2013
Sonic Pavilion - Inhotim
Na excursão a Inhotim (Museu de Arte Contemporânea), o meu grupo de estudo escolheu o Sonic Pavilion (Som da Terra), obra de Doug Aitken. Essa construção é situada na parte mais alta de um morro, na qual para chegar ate ela, deve-se seguir um caminho afastado do resto das obras. O Som da Terra tem o objetivo de criar uma conexão forte entre o espectador e a natureza. Dentro da construção, alto-falantes estão transmitindo o som, ao vivo, dos movimentos e vibrações que a terra realiza a 200 m de profundidade. Esse pavilhão, de forma circular, é feito de vidro. O mesmo tem uma lamina plastica que deixa a vista embaçada, porém quando você se situa no centro, é possível ver toda a paisagem natural do lado de fora, claramente.
 |
| Croquis do Som da Terra, do lado de fora. |
.JPG) |
| Croquis no interior do pavilhão. |
.JPG) |
| Croquis no interior do pavilhão. |
sábado, 6 de abril de 2013
Sensores Analógicos
Os sensores analógicos são aqueles que respondem através de sinais analógicos, ou seja, sinais que, mesmo limitados em uma certa faixa, podem variar entre inúmeros valores de tensão intermediários.










O exemplo mais comum de sensor resistivo é o LDR (Light Dependent Resistor – Resistor Dependente de Luz), um componente onde uma variação na luminosidade que incide sobre ele resulta numa variação na sua resistência.
O LDR não tem pinagem, ou seja, podemos ligar seus terminais de qualquer forma.
Para fazer a medida da luminosidade do ambiente através do LDR, precisamos fazer com que a variação da resistência do componente seja convertida numa variação de tensão. Essa tensão pode ser utilizada por um circuito externo ou ser monitorada através da entrada analógica do MEC1000 ou do KDR5000, por exemplo. O meio mais fácil de conectá-lo é através de um divisor de tensão.
Outro modelo de sensor resistivo muito comum é o termistor, um componente destinado medir variações de temperatura.
Assim como o LDR, o termistor não possui uma pinagem específica. O termistor, de acordo com a simbologia europeia.
Existem dois tipos de termistores, NTC e PTC, assim classificados de acordo com sua resposta em função da temperatura. Os termistores NTC (Negative Temperature Coef icient – Coeficiente de Temperatura Negativo) são os modelos mais comuns e são feitos de materiais semicondutores simples. Eles são assim denominados, pois a resistência desses componentes diminui quando a temperatura aumenta, ou seja, eles possuem um coeficiente de temperatura negativo.
Os termistores PTC (Positive Temperature Coef icient – Coeficiente de Temperatura Positivo) são mais difíceis de serem encontrados, pois são constituídos de elementos mais complexos e, portanto, mais caros. Seu comportamento é contrário aos NTC, pois o aumento da temperatura faz com que sua resistência também aumente. Os termistores PTC são mais comumente aplicados para proteger circuitos eletrônicos de excessos de correntes, substituindo os fusíveis tradicionais.
Para fazer a medição da temperatura através do termistor, podemos ligá-lo na forma de um divisor de tensão, pois ele é um sensor resistivo. Desse modo, a tensão resultante nesse circuito será correspondente à temperatura do ambiente. Isso porque, como vimos acima, a resistência do termistor está relacionada como a temperatura do ambiente ao seu redor.
Os sensores de peso (que também são conhecidos como sensores de pressão ou de força) podem ser construídos de diversas formas, mas os modelos mais comuns e cuja utilização é mais simples são os resistivos. O princípio de seu funcionamento é bem simples: quanto maior a força exercida sobre ele, menor será a resistência entre seus terminais.
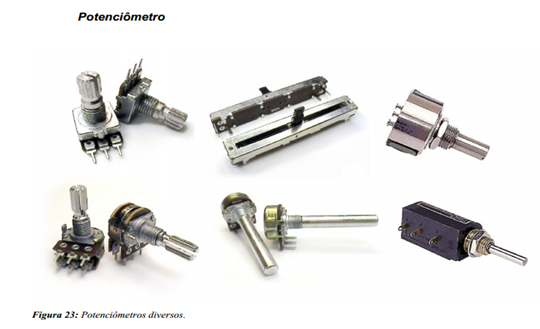
Um potenciômetro é um componente eletrônico que possui resistência elétrica ajustável. Geralmente, é um resistor de três terminais onde a conexão central é deslizante e manipulável. Se todos os três terminais são usados, ele atua como um divisor de tensão.
Existem comercialmente, potenciômetros confeccionados com substrato em fio e carvão condutivo, a depender da corrente elétrica que circula nestes. Há potenciômetros cujo giro é de 270 graus e outros de maior precisão chamados multivoltas.
Exemplo de uso: tem-se fonte de 12V. Pretende-se ativar um circuito que necessita de 8V e outro que necessita de 4V. Coloca-se um potenciômetro com sua perna central conectada ao positivo da fonte e as outras duas conectadas aos circuitos e, então, basta regular.
O microfone converte vibrações mecânicas na gama audível (em frequências de 20Hz a 20kHz – seja no ar, água ou num material sólido) em um sinal elétrico. Na maioria dos microfones em uso as ondas sonoras são convertidas em vibrações mecânicas através de um diafragma fino e flexível e em seguida convertidas em sinal elétrico através de bobina móvel ou por carga e descarga de um condensador. No caso de microfones de condensador estes necessitam de uma tensão de alimentação continua, chamada de phantom Power, que é de fato uma tensão de polarização.
A tensão de repouso (Vrep), também chamada de nível DC ou Offset, é a tensão presente na saída do circuito quando o sensor estiver em repouso, ou seja, quando nenhum som é captado pelo microfone. No momento em que as ondas sonoras fazem vibrar o diafragma do microfone, é gerado então um sinal variável.
Como o sinal é alternado, a sua tensão varia acima e abaixo da tensão de repouso. No circuito acima, a tensão de repouso é de 0V. Ou seja, quando o microfone captar algum som, haverá um sinal analógico que varia até uma tensão de pico V, ou seja, de +V (valor máximo) a -V (valor mínimo).
A maior parte dos conversores A/D não pode ler tensões negativas, como por exemplo, o conversor A/D presente no microcontrolador do KDR5000 e do MEC1000, que suporta tensões de 5 V a 0 V. Sendo assim, é necessário fazer com que a tensão de repouso seja maior, para que o valor mínimo do sinal analógico seja ligeiramente maior que 0 V. Desse modo, o sinal de saída do microfone estará enquadrado nos valores de leitura do conversor.
O sensor de vibração é um componente destinado a captar uma vibração e convertê-la num sinal elétrico. Seu funcionamento é muito semelhante ao de um microfone, mas enquanto que no microfone as vibrações são causadas por ondas sonoras, o sensor de vibração destina-se à vibração de estruturas.
Como o sensor de vibração utilizado é composto unicamente por um cristal piezoelétrico com dois eletrodos, sem nenhum componente eletrônico extra, não é necessário alimentá-lo. Um dos terminais do sensor deve ser aterrado, ligado ao negativo da alimentação. O outro terminal será a origem do sinal do sensor, que será monitorado por um circuito externo, depois de ser previamente adequado.
Existem vários modelos de sensores de distância disponíveis no mercado, baseados em radar, ultra-som, laser ou infravermelho. Os sensores baseados em radar e ultra-somsão caros e relativamente difíceis de operar. Á os sensores ópticos, que utilizam raios laser ou infravermelho, tem seu funcionamento baseado no princípio da triangulação. Um feixe de luz é emitido por um diodo laser ou um LED infravermelho. Ao ser refletido por um objeto, esse raio é detectado por um PSD (Position Sensing Device – Dispositivo de Monitoramento de Posição). De acordo com a distância do objeto que refletiu a luz, esse raio incide de modo diferente no PSD.

O PSD é composto por vários componentes sensíveis à luz (fotodiodos). Um módulo de processamento monitora a resposta do PSD, podendo identificar a posição exata em que o raio incidiu no componente. Como essa posição depende da distância do objeto que refletiu o feixe de luz, o módulo processa esses sinais de modo a produzir uma saída correspondente a essa distância.
Quando alimentado corretamente, o módulo de processamento do sensor gera um sinal de saída cuja tensão varia de acordo com a distância do objeto. Objetos numa distância de 5 a 80 cm do sensor podem ser facilmente identificados. Quando a distância entre o sensor e o objeto se manter estável, a tensão de saída do sensor será constante, correspondente à distância do objeto.
A utilização desse sensor é muito simples. Ele possui apenas três terminais de conexão, que podem ser identificados através da figura abaixo. A alimentação deve ser feita ligando o terminal V+ é à alimentação de 5V e o terminal GND deve ser ligado ao 0 V. É importante que a tensão não seja superior ou inferior a 5 V, com o risco de queima ou não funcionamento do componente. O terminal Vo é à saída do sensor.


Assim como qualquer sensor analógico, eles possuem um sinal de saída cuja tensão corresponde à temperatura do ambiente onde se encontra o sensor. Esse sinal analógico pode ser utilizado por um outro circuito analógico, como um AmpOp comparador, ou pode ser convertido num sinal digital para ser monitorado por um circuito digital, como um microcontrolador.

Nos acelerômetros analógicos, a saída é um valor de tensão proporcional à aceleração sofrida pelo componente. Caso a aceleração se mantenha constante, a tensão na saída do acelerômetro também estará constante.
Para melhores explicações entre no link
http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/tutorial_eletronica_-_aplicacoes_e_funcionamento_de_sensores.pdfsexta-feira, 5 de abril de 2013


.JPG){kind=link}
quinta-feira, 4 de abril de 2013
Performance em Catas Altas
Em Catas Altas, cada grupo teve que fazer uma performance e apresenta-la para o resto da turma. Tínhamos que conseguir representar e estranhar nosso lugar, para que assim ele ficasse interiorizado na gente.
Link da performance: http://www.youtube.com/watch?v=TWwvblXQMZc
Croquis da Viagem a Catas Altas
 |
| Croquis dos troncos de madeira e o que estava envolta (outros alunos). Foi uma atividade muito interessante, os professores colocaram musicas diferentes enquanto elaborávamos nossos croquis, e essa musica nos influenciava. |
 |
| Outro croquis dos troncos de madeira, de um angulo diferente. |
 |
| Croquis da praça escolhida por meu grupo. |
 |
| Outro croquis da praça. |
 |
| Croquis dos bancos da Igreja Matriz de Nossa Senhora da Conceição. |
 |
| Croquis de um Sacrario, de um dos diversos altares da Igreja. |
 |
| Croquis de uma Igreja em Catas Altas. |
Assinar:
Postagens (Atom)